Joint Optimization
Camera poses are optimized with the SDF geometry and color networks instead of being treated as fixed inputs.
1 Faculty of Engineering, Cairo University 2 University of Science and Technology Zewail City
NoPose-NeuS: NeurIPS 2023 UniReps Workshop
BA-NeuS: Springer Nature Virtual Reality Journal, 2026
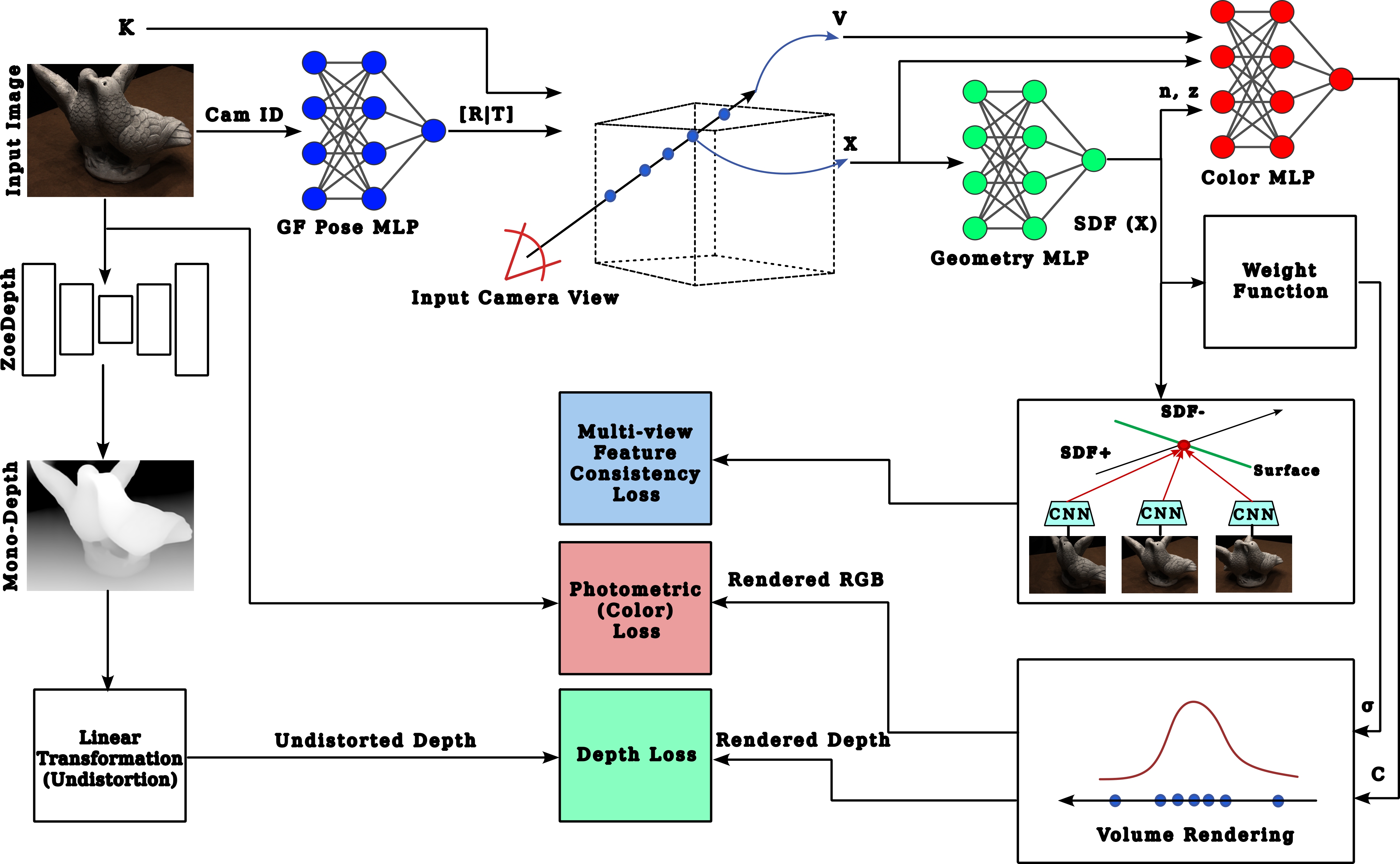
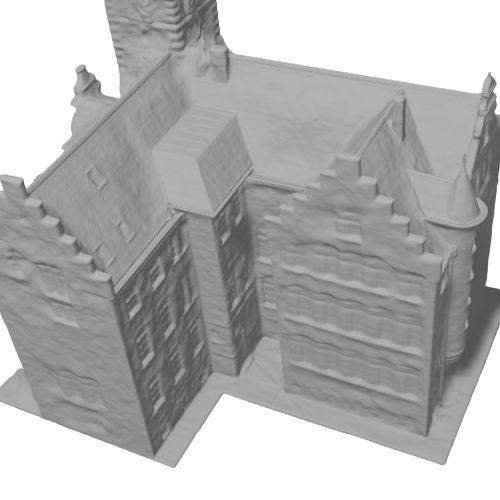
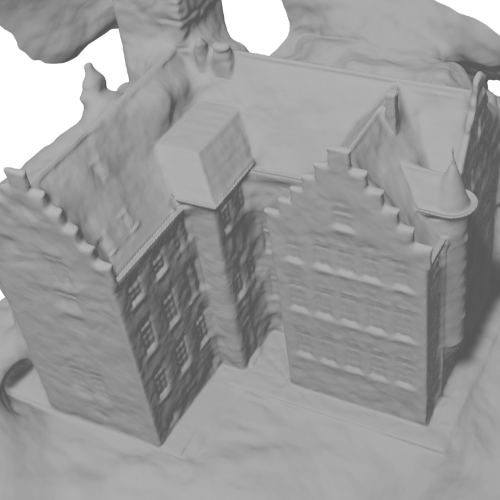
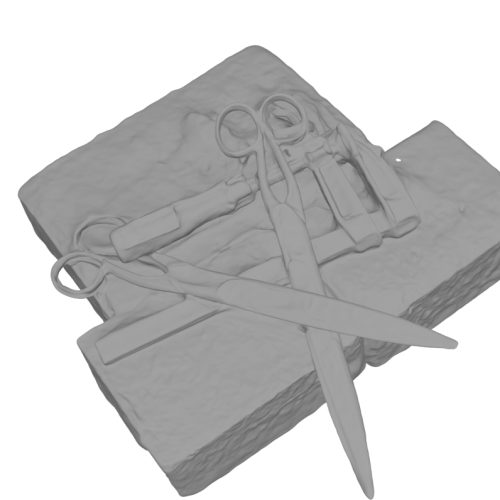
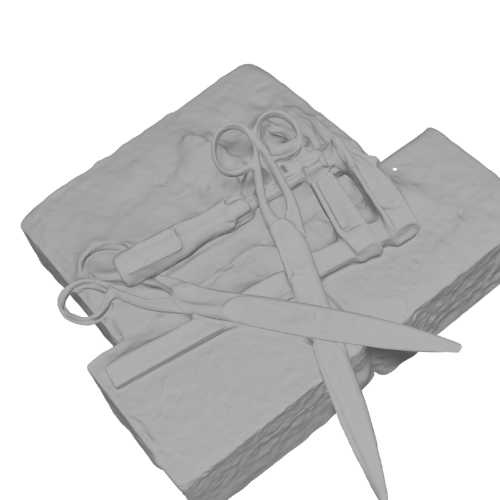
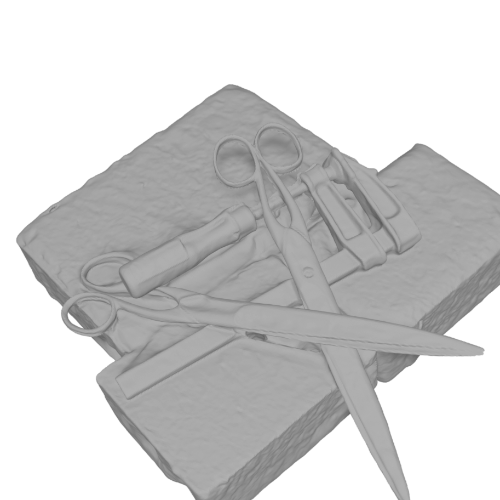
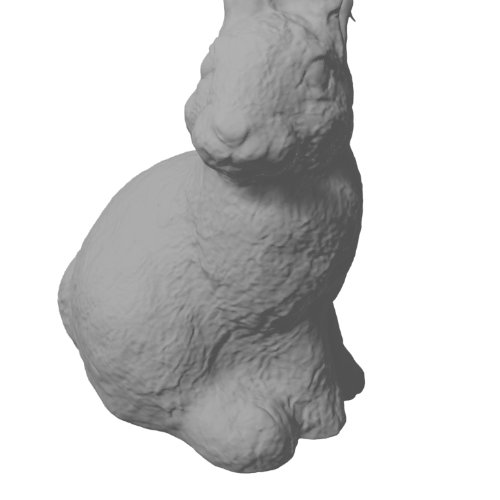
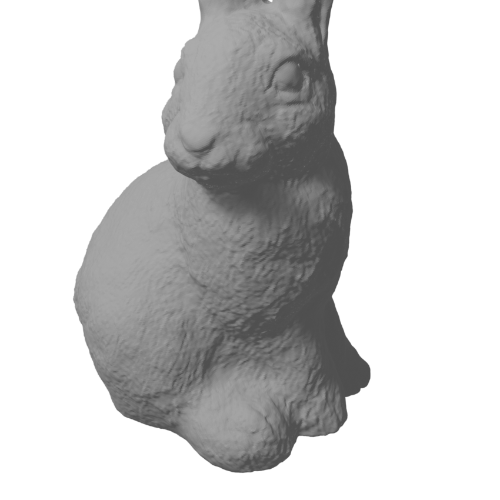
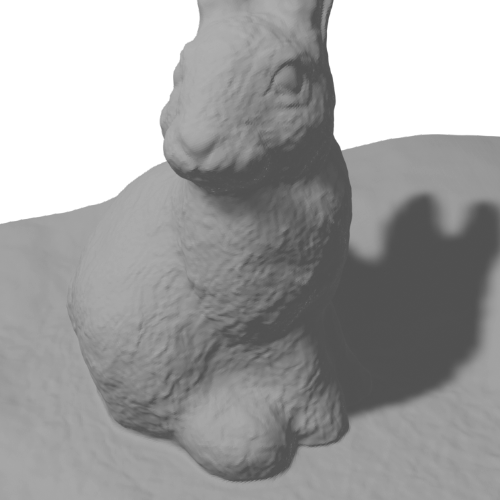
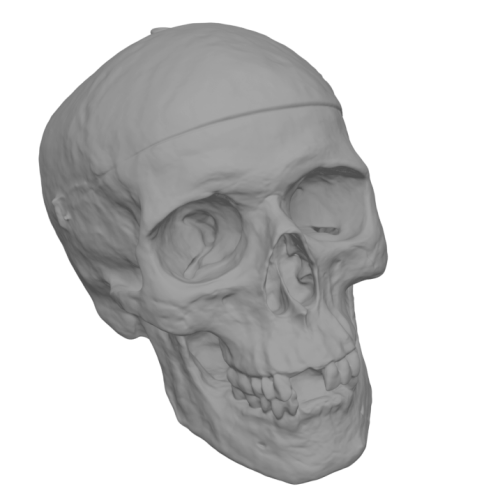
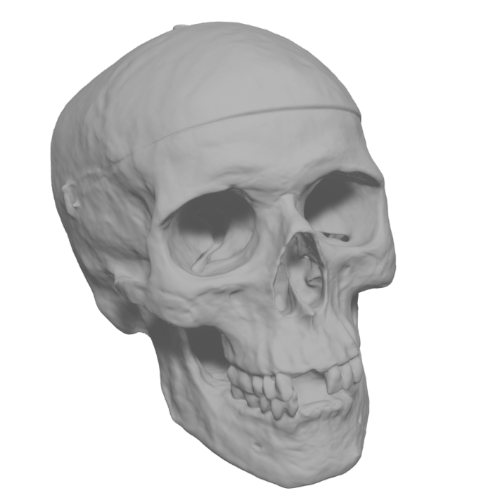
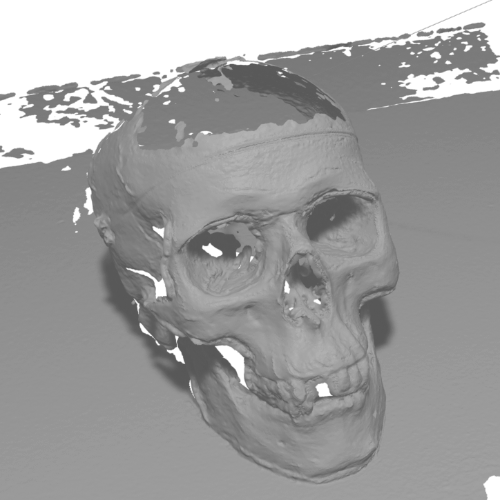
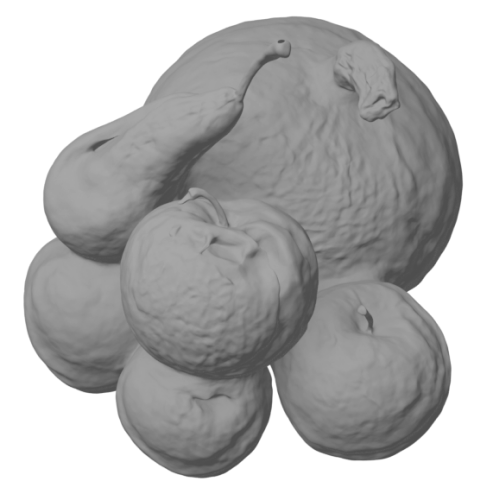
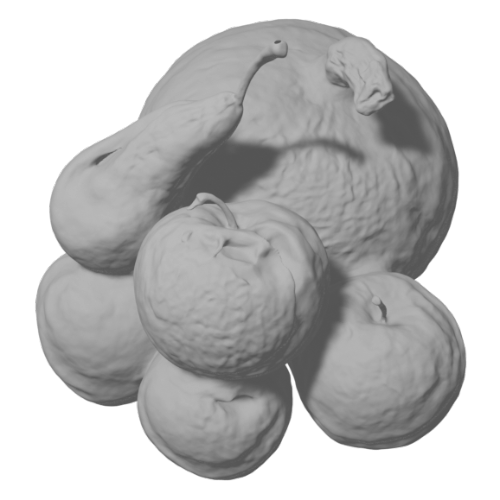
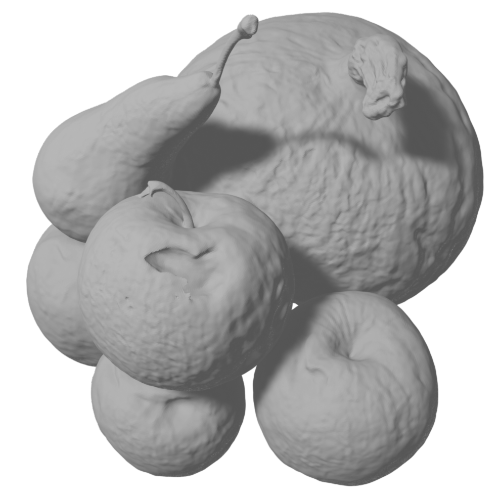
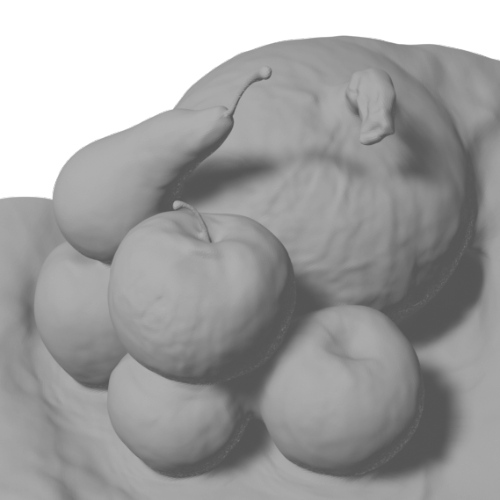
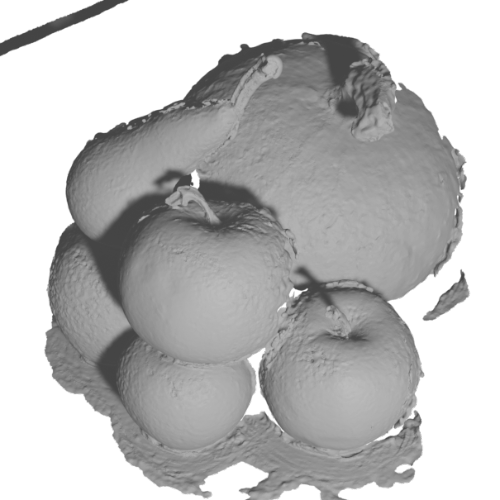
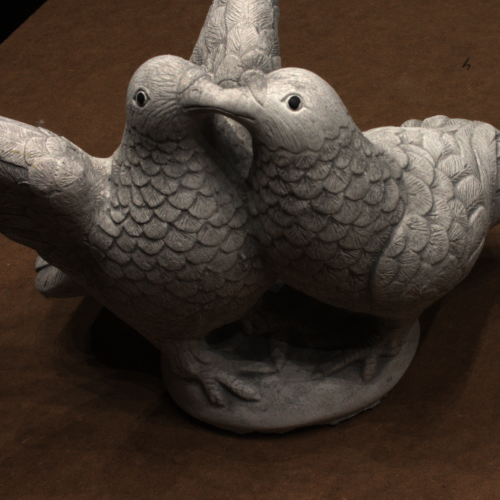
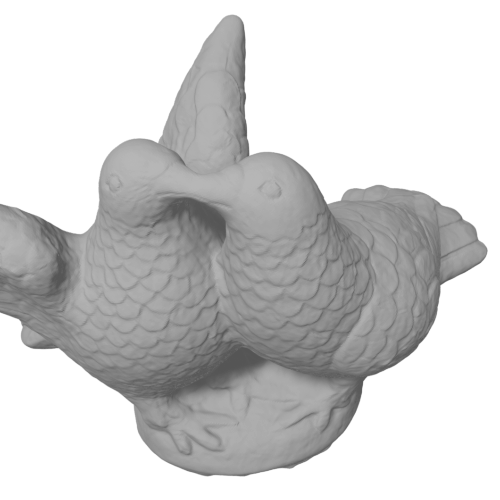
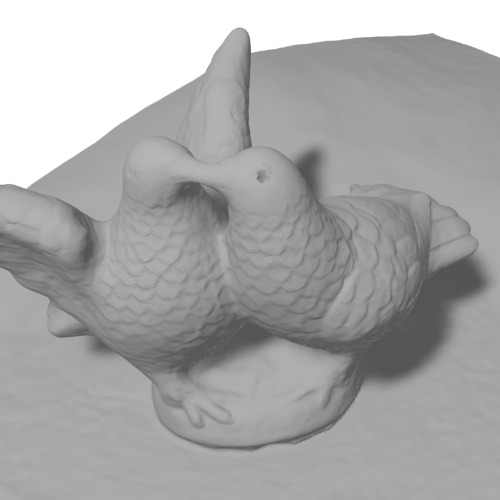
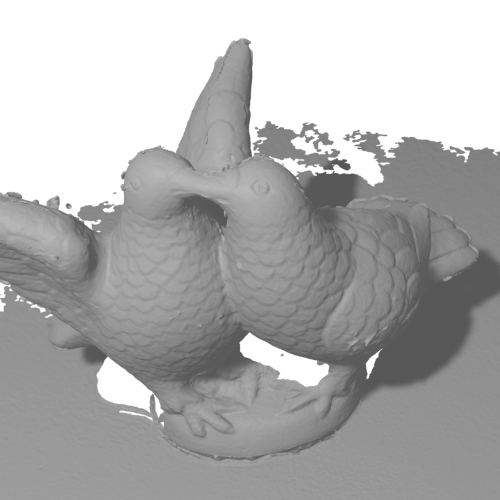
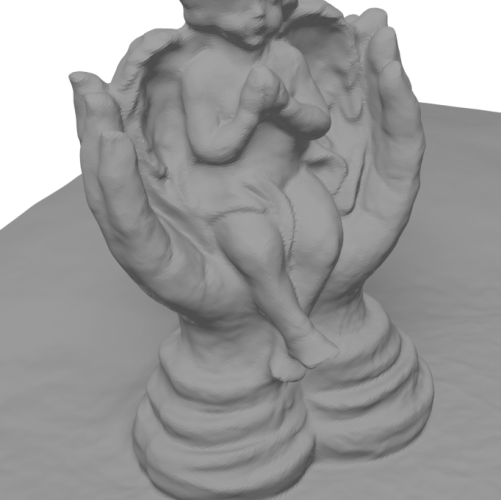
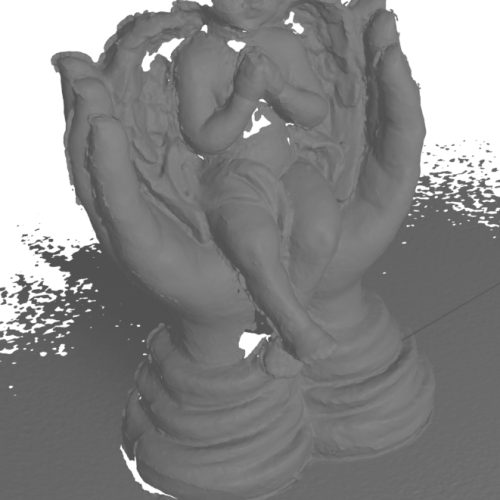
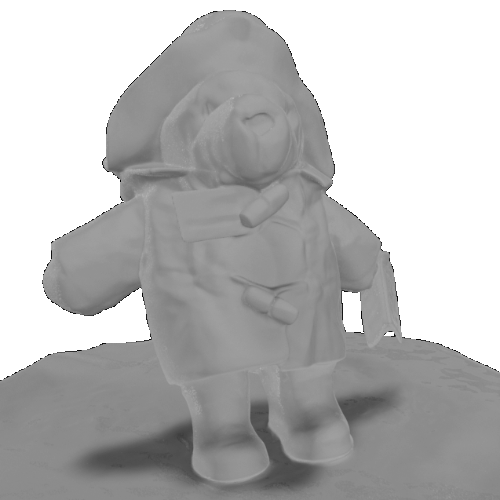
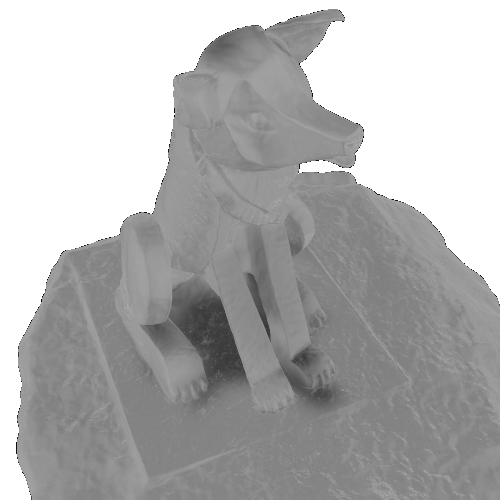
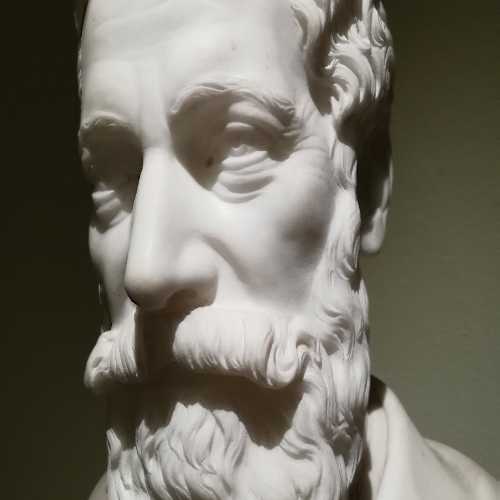
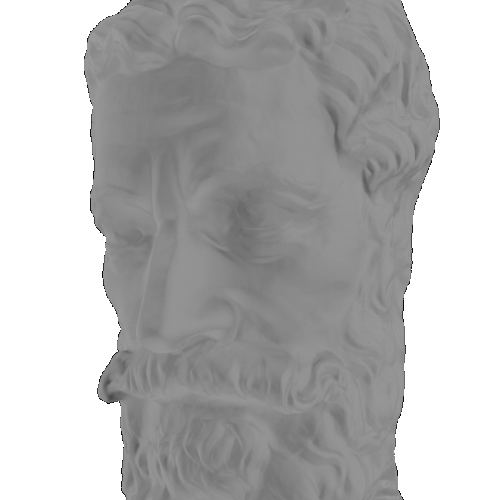
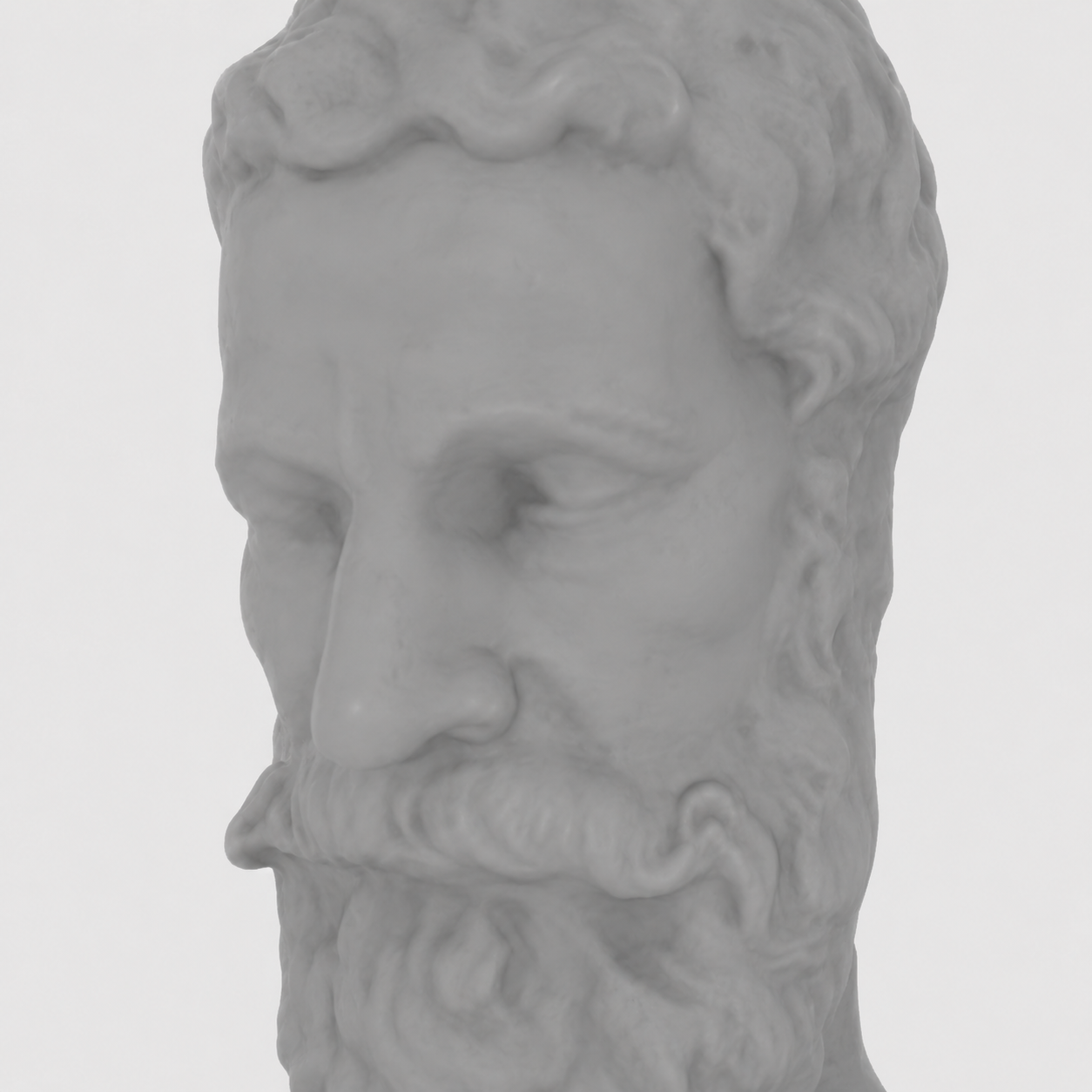
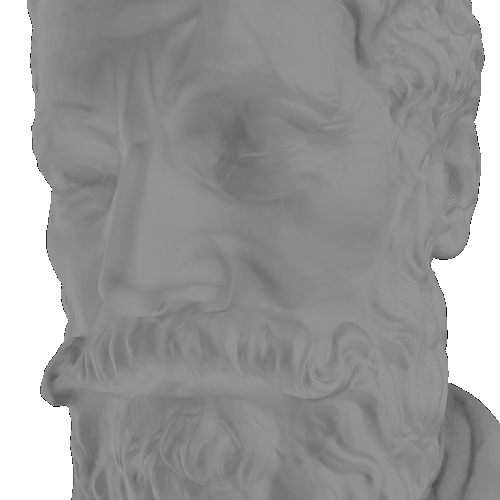
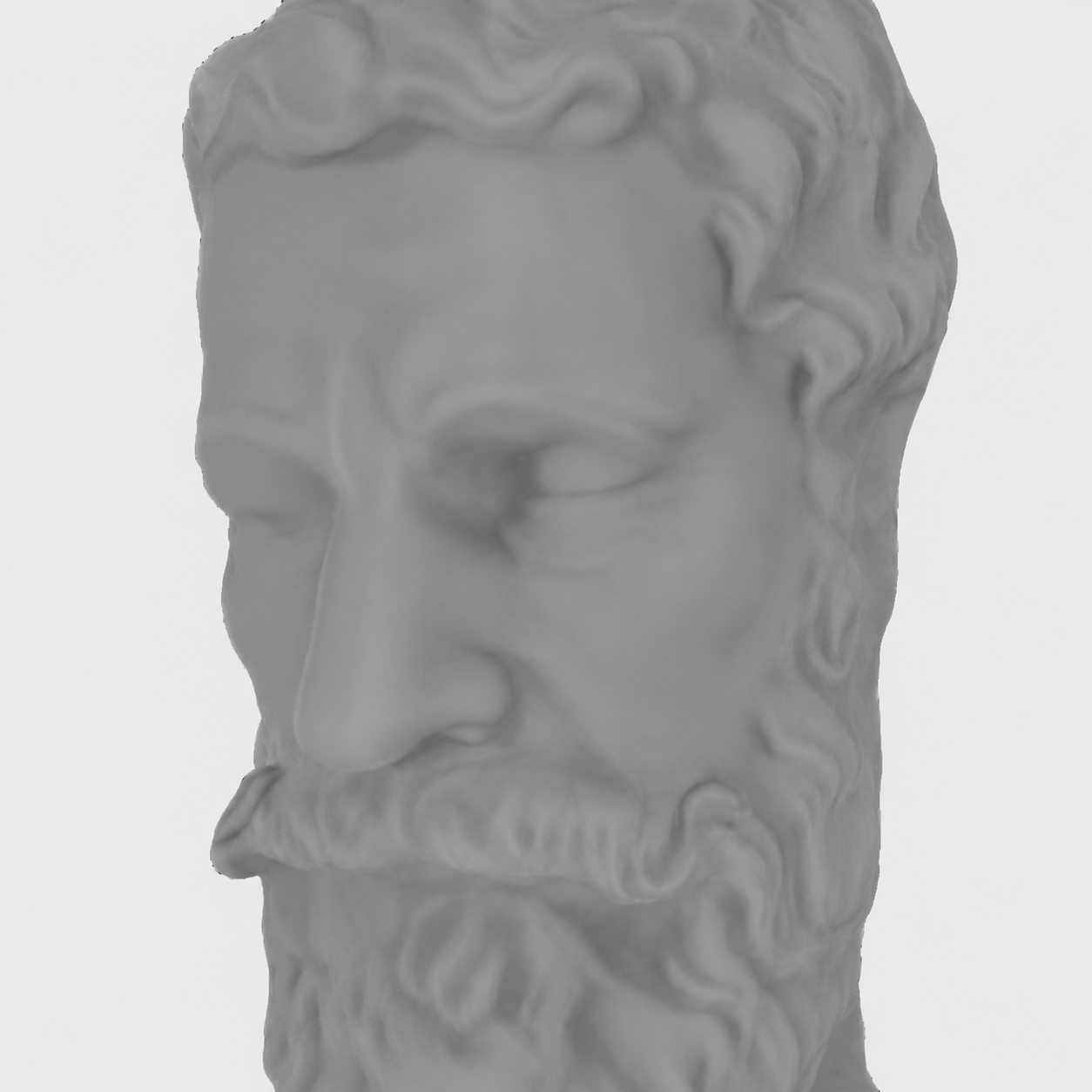
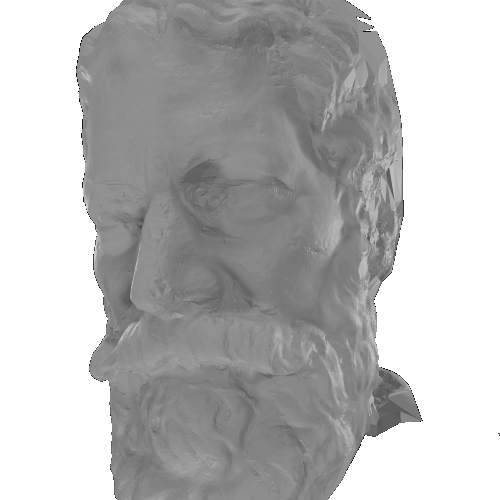
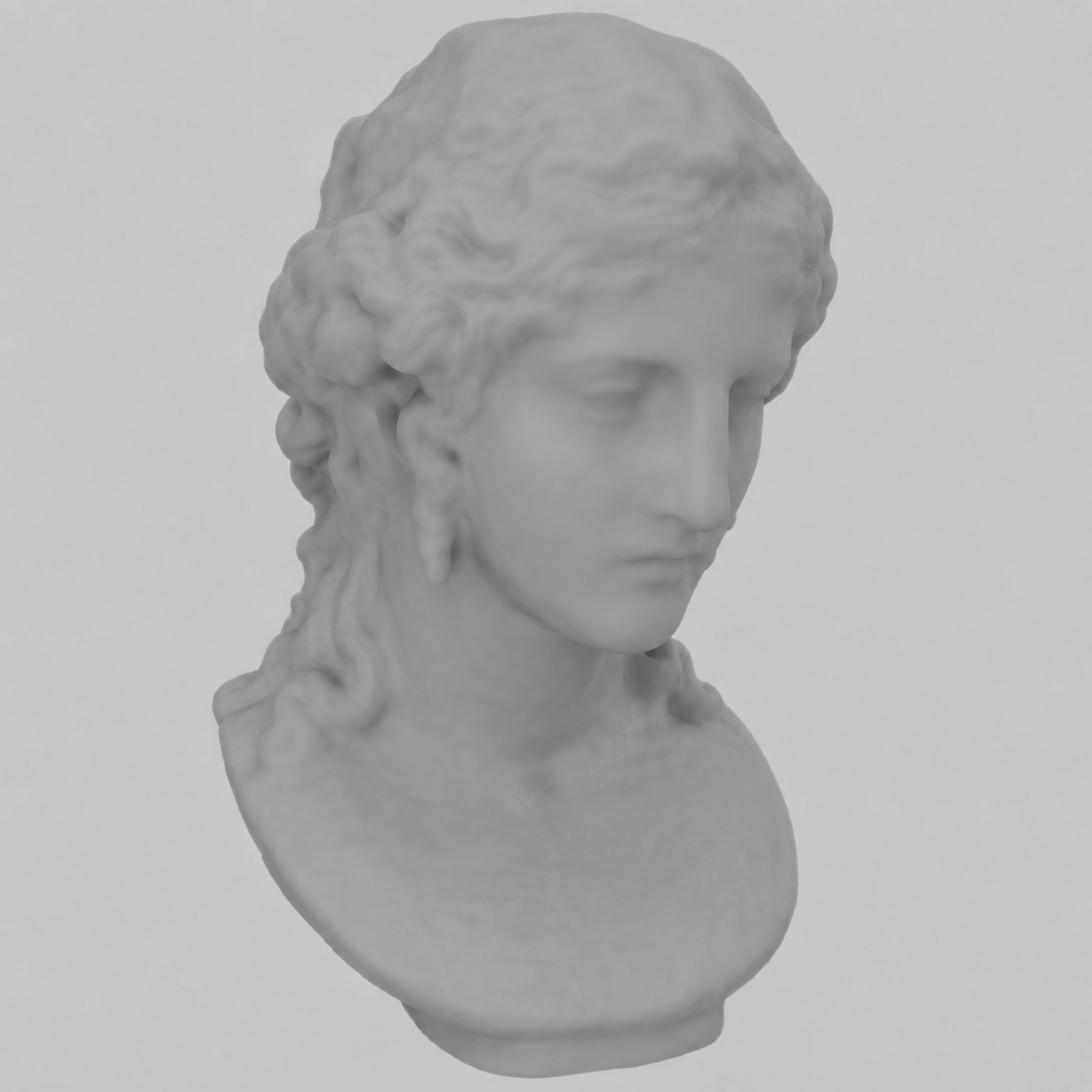
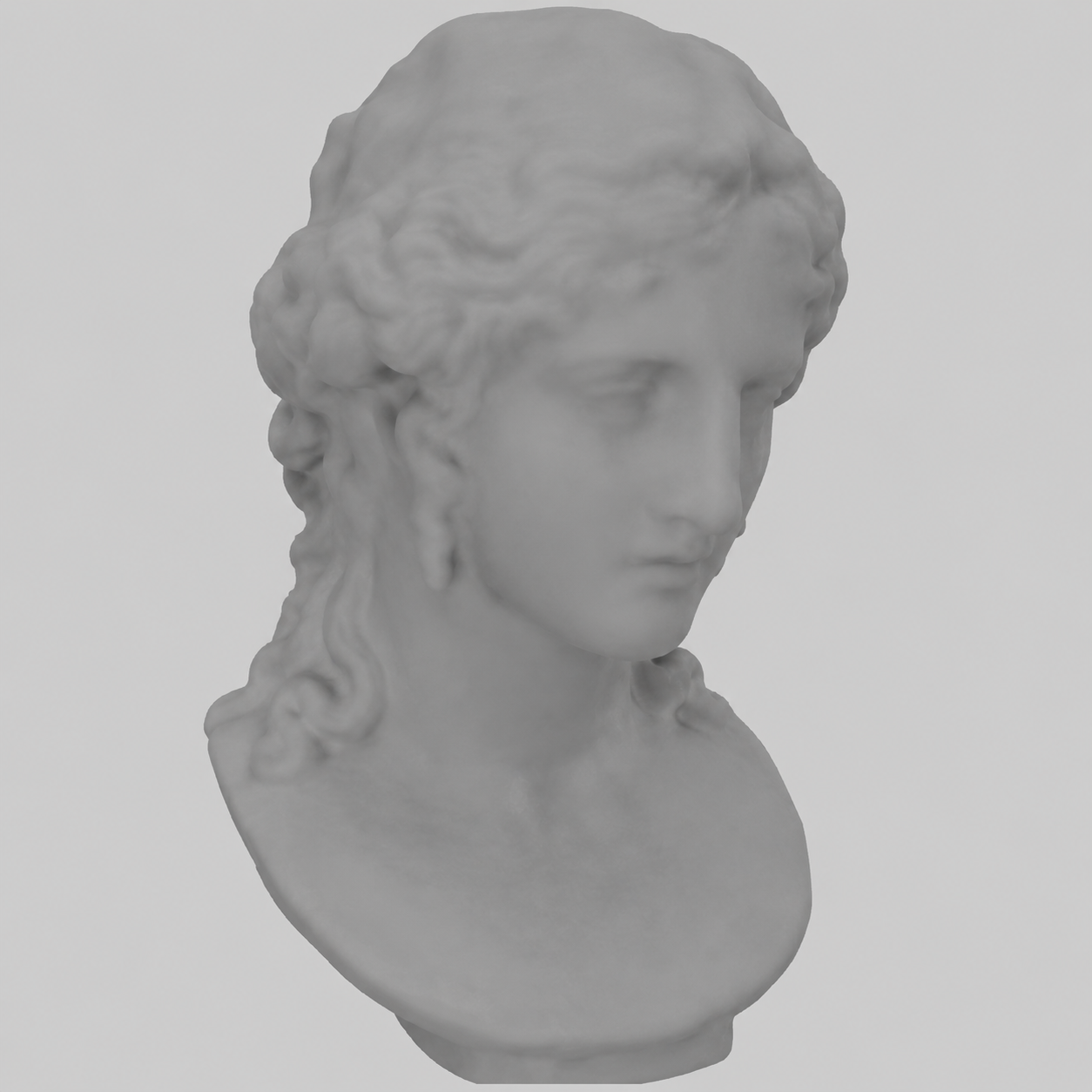
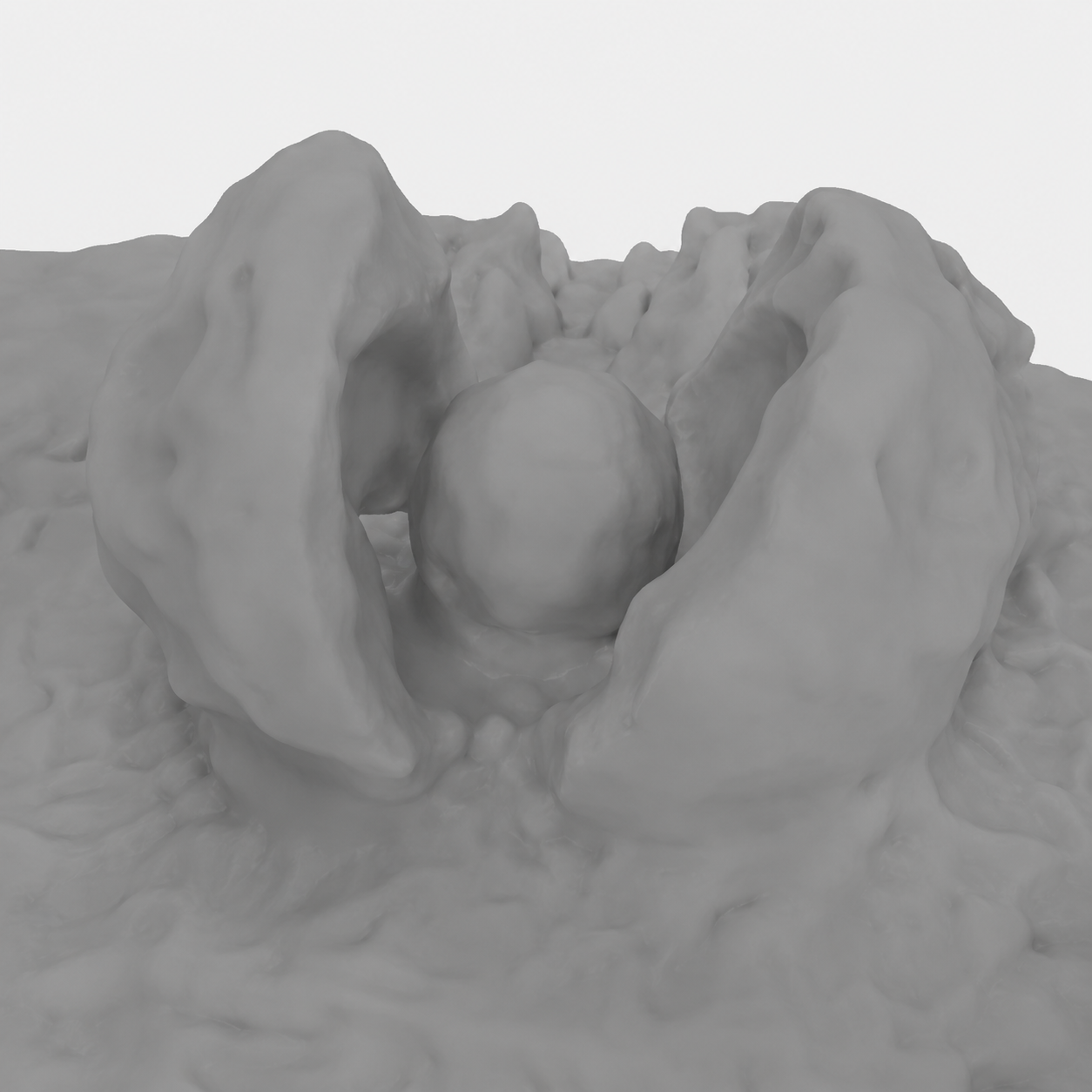
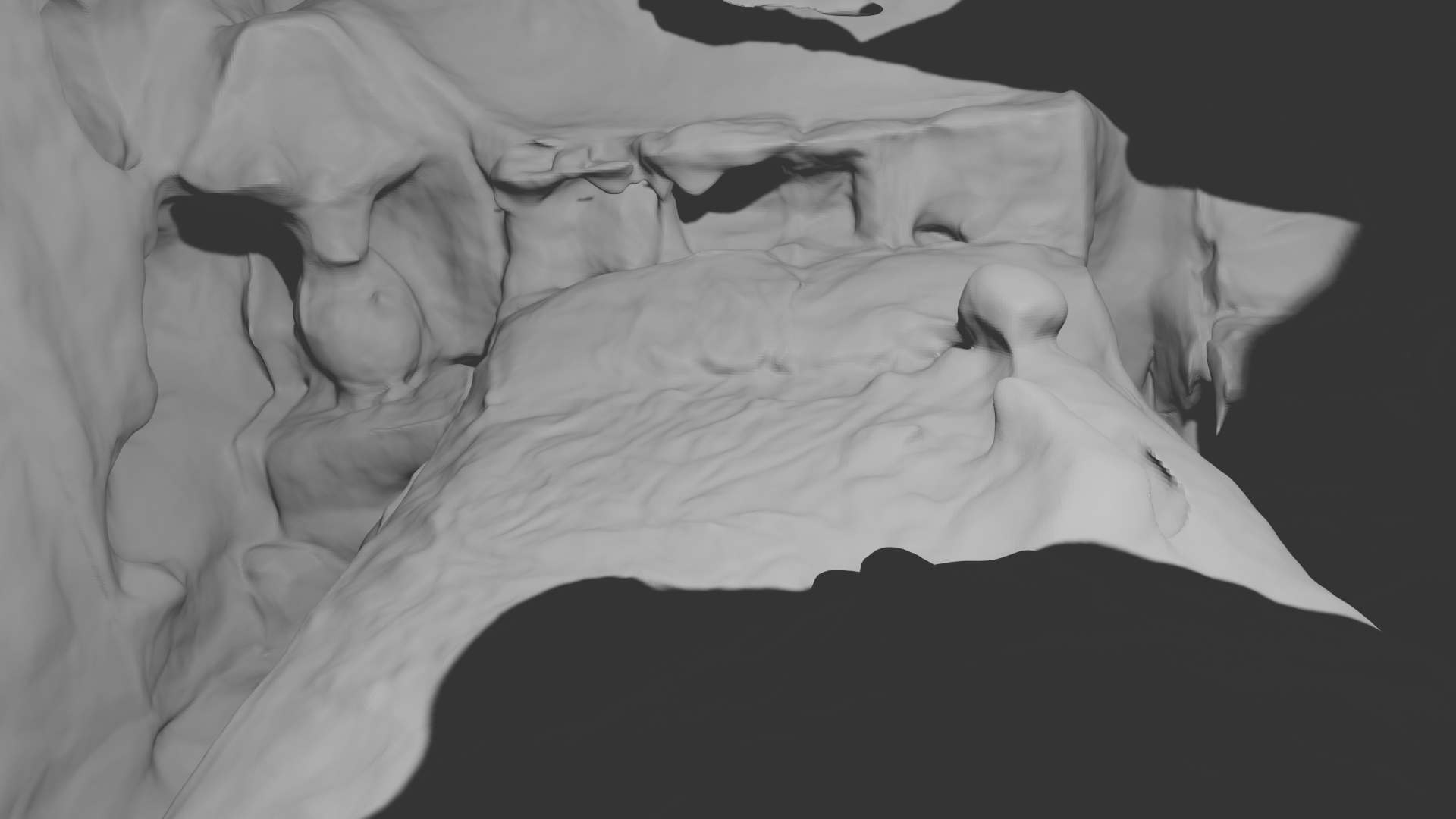
Neural implicit surface methods can recover challenging geometry, including thin structures and non-Lambertian surfaces, but they typically require accurate camera parameters. NoPose-NeuS relaxes this assumption by extending NeuS to optimize camera poses together with geometry and appearance.
NoPose-NeuS represents camera poses with an MLP and adds multi-view feature consistency plus rendered-depth supervision. These constraints help recover camera poses while preserving high-quality reconstructed surfaces.
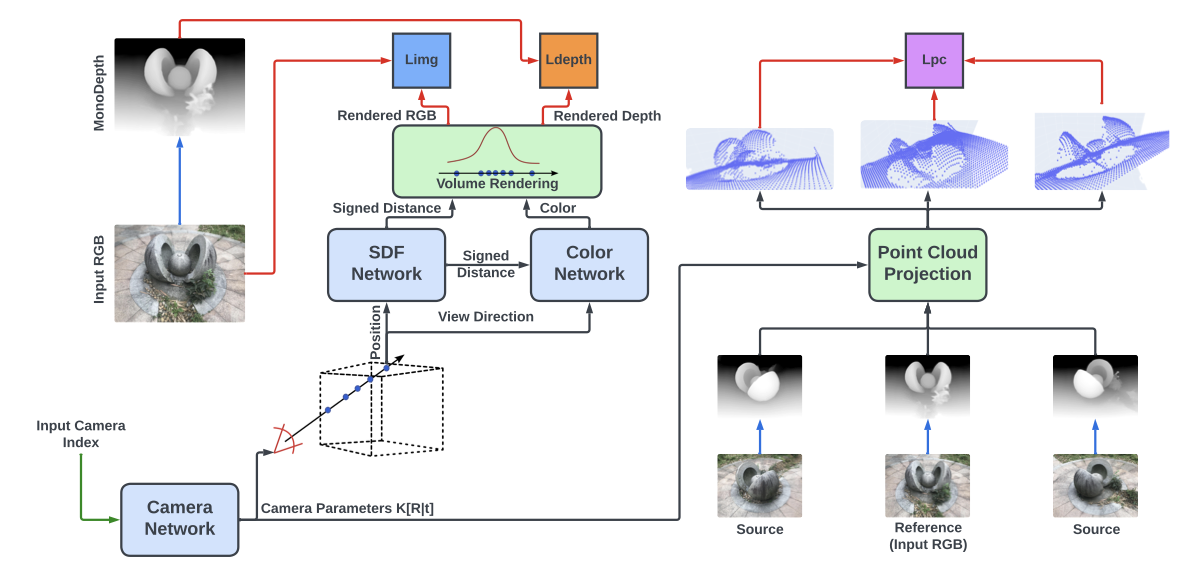
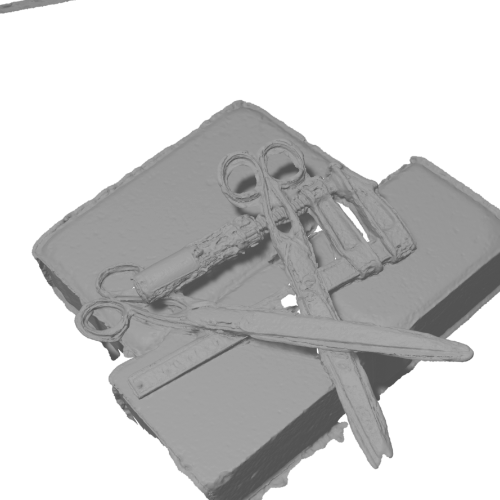
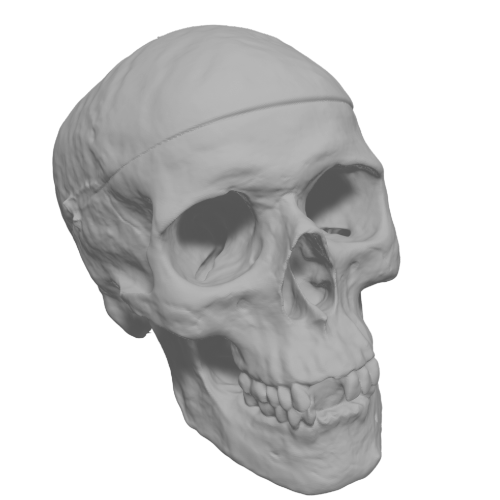
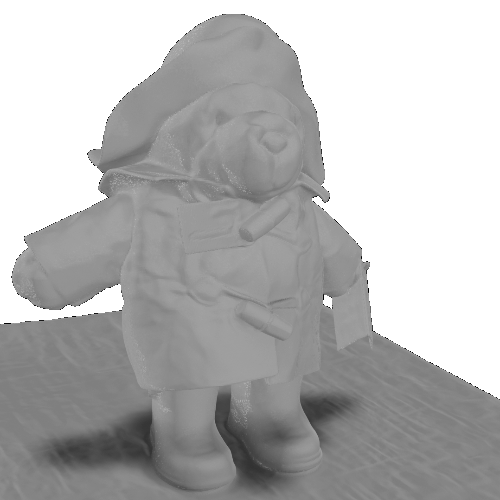
BA-NeuS is the extended journal version of this work. It builds on NoPose-NeuS by jointly optimizing camera intrinsics in addition to poses, and by adding a multi-view point-cloud alignment constraint for more stable camera-parameter estimation.
Camera poses are optimized with the SDF geometry and color networks instead of being treated as fixed inputs.
Each camera index is mapped through Gaussian Fourier features, then decoded by an MLP into rotation and translation parameters.
Multi-view feature consistency and rendered depth loss guide the pose estimates and reduce degenerate surface solutions.
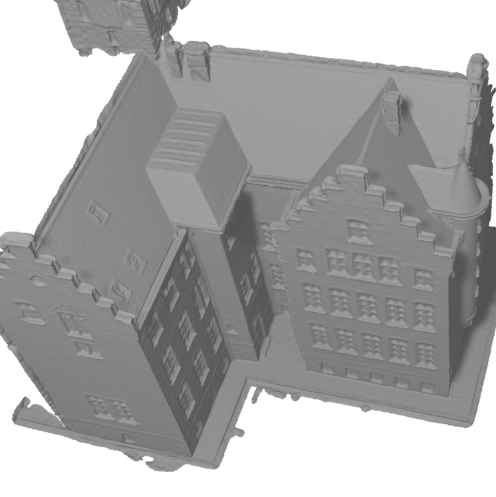
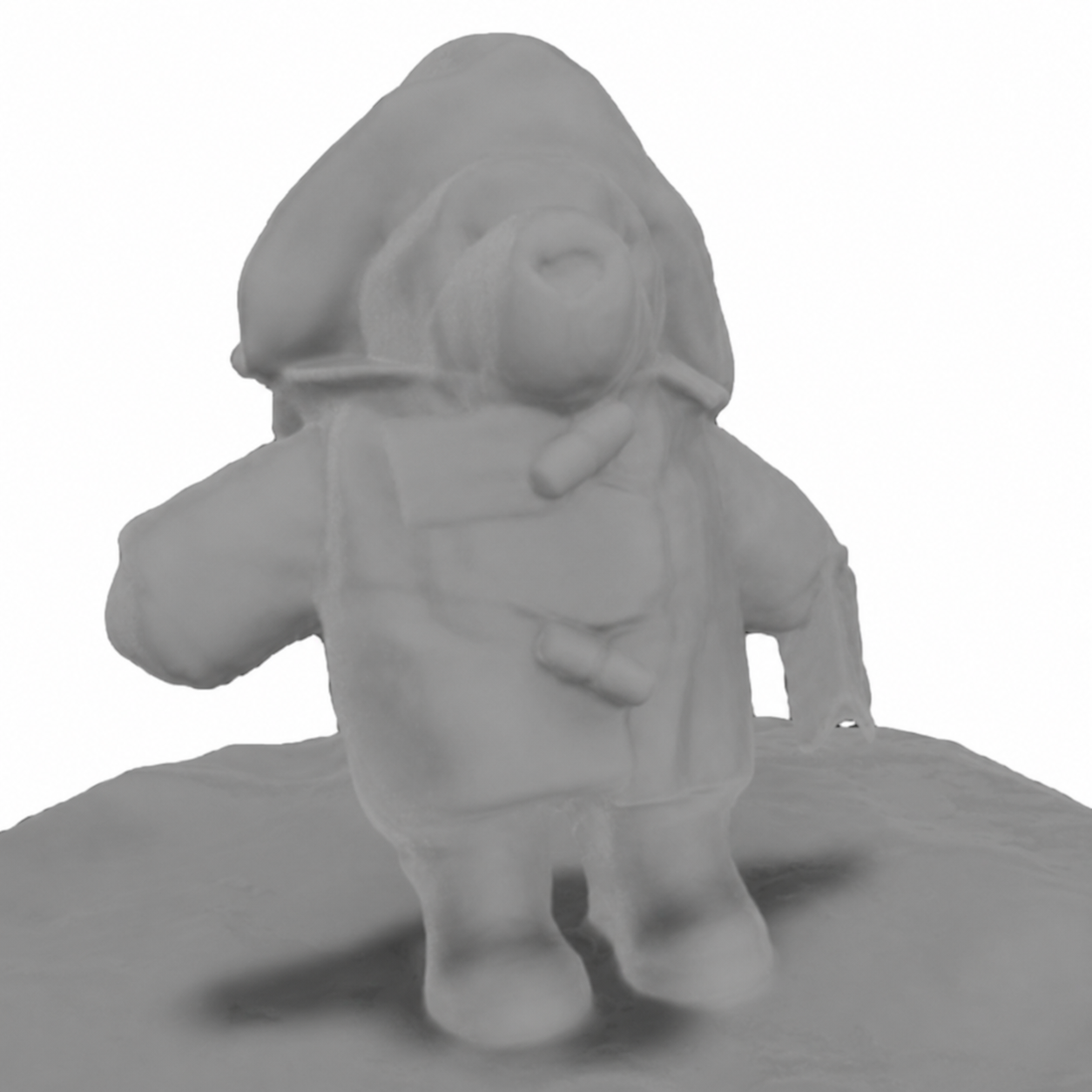
BA-NeuS extends NoPose-NeuS by estimating camera intrinsics together with camera poses. On DTU, the journal version gives a modest average Chamfer-distance improvement over NoPose-NeuS while remaining comparable to posed-reconstruction baselines such as NeuS and MonoSDF.
| Method | Camera Setting | DTU Chamfer ↓ | RPEr ↓ | RPEt ↓ |
|---|---|---|---|---|
| COLMAP | Estimates cameras | 1.36 | 0.67 | 0.95 |
| NeuS | Uses accurate cameras | 0.84 | -- | -- |
| MonoSDF | Uses accurate cameras | 0.84 | -- | -- |
| NoPose-NeuS | Optimizes poses | 0.89 | 0.63 | 0.93 |
| BA-NeuS | Optimizes poses and intrinsics | 0.86 | 0.62 | 0.90 |


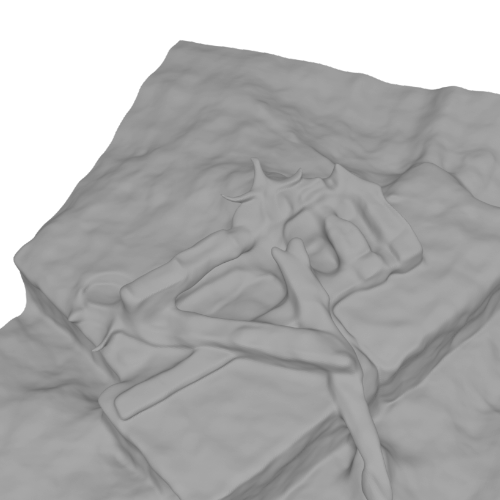


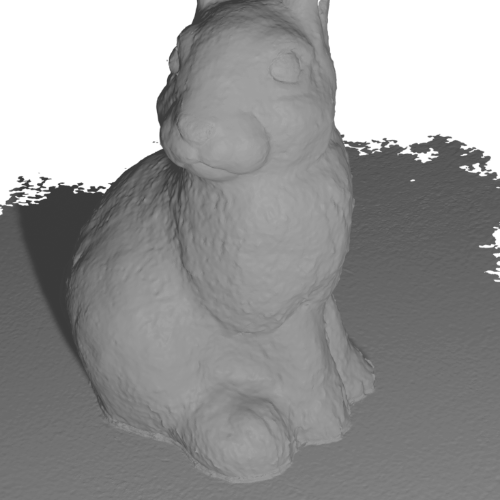

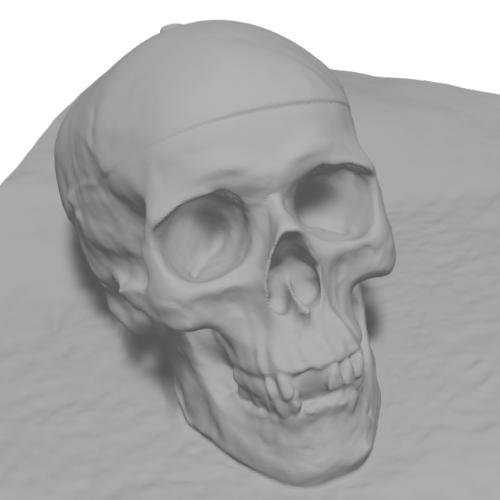









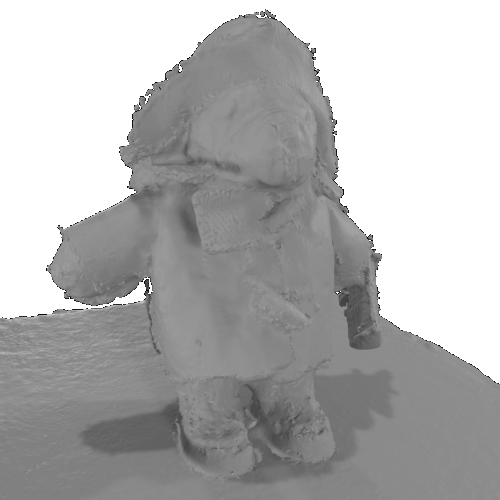

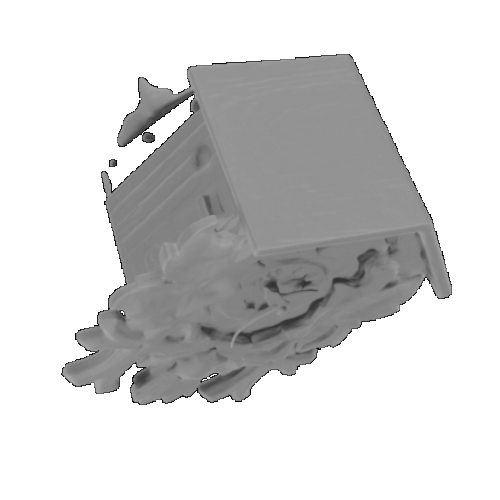
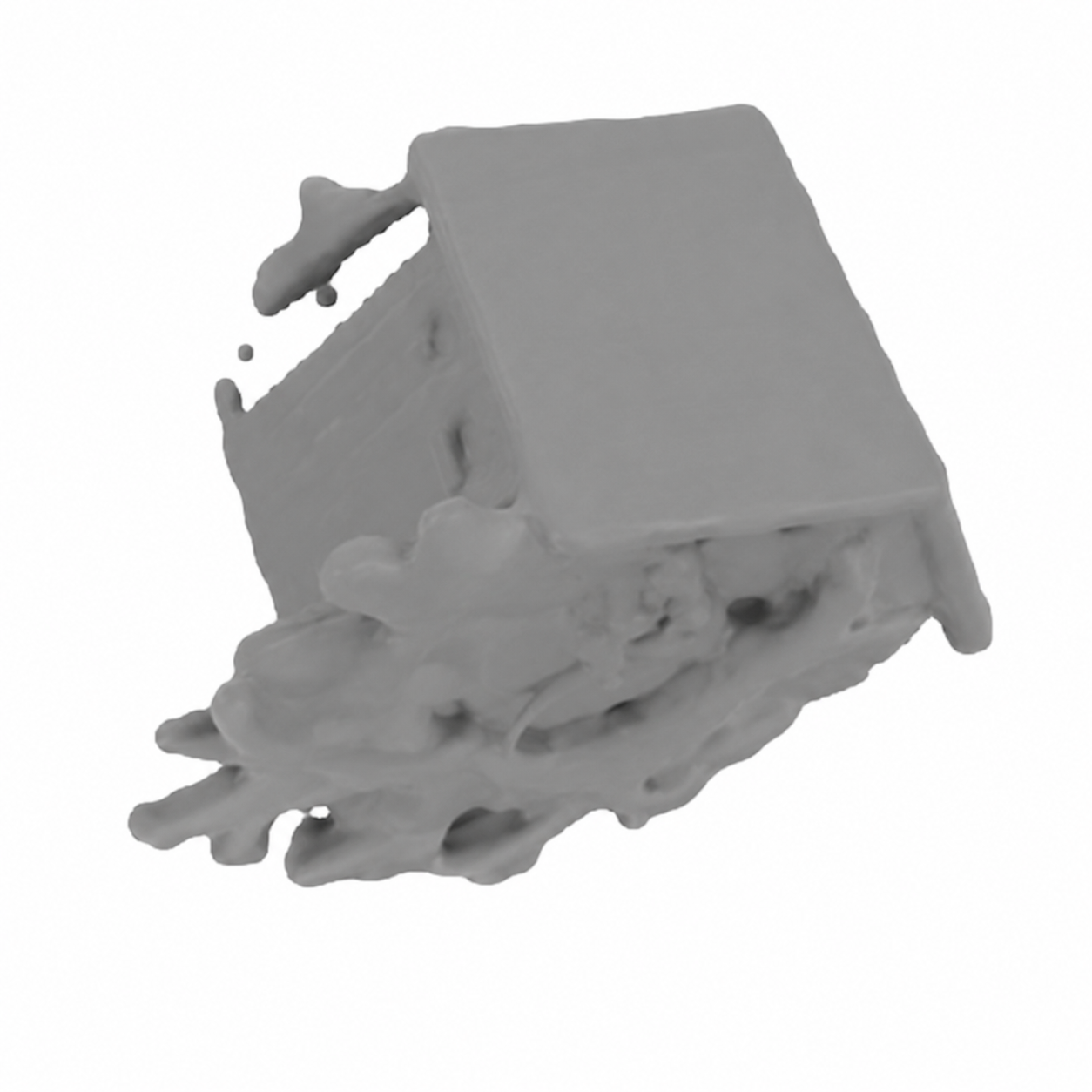
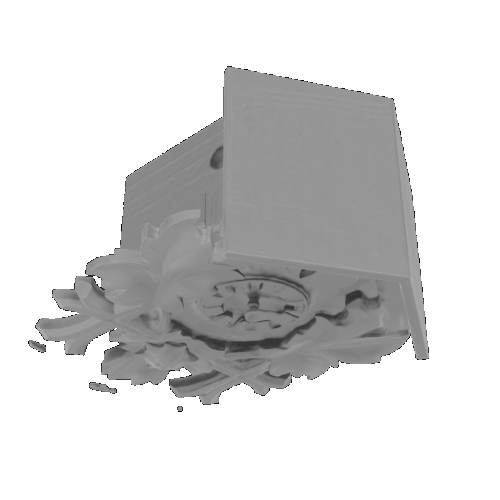
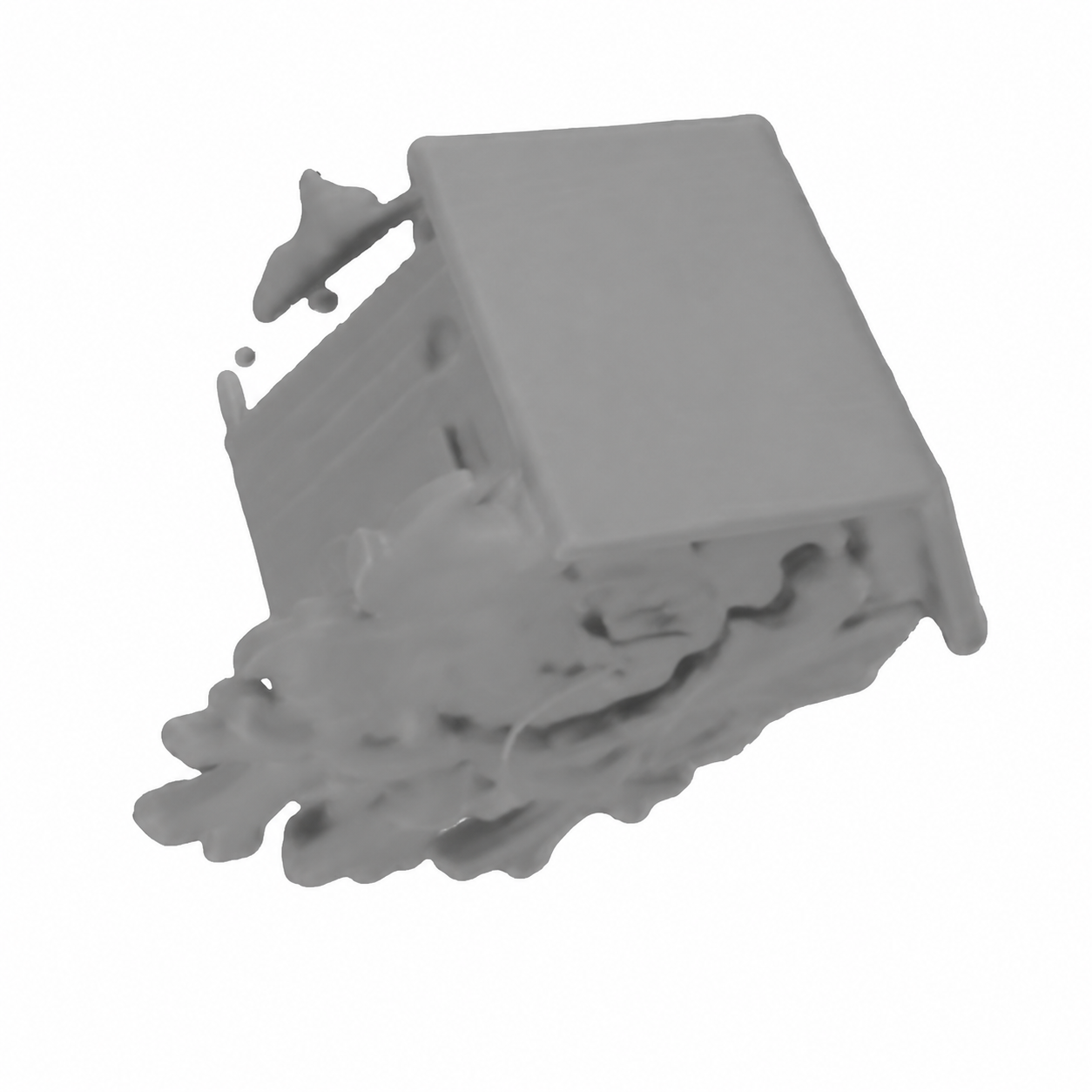












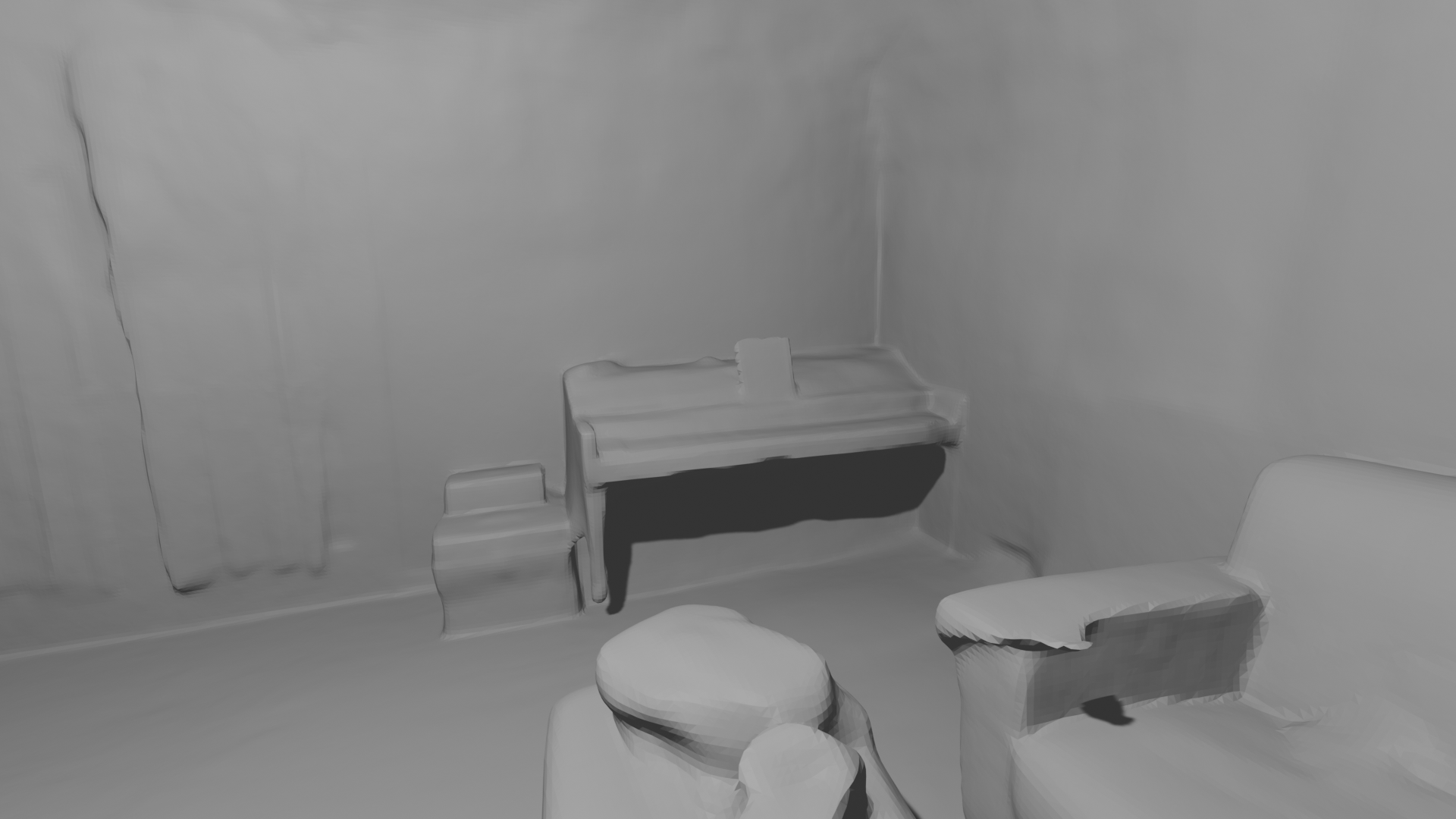
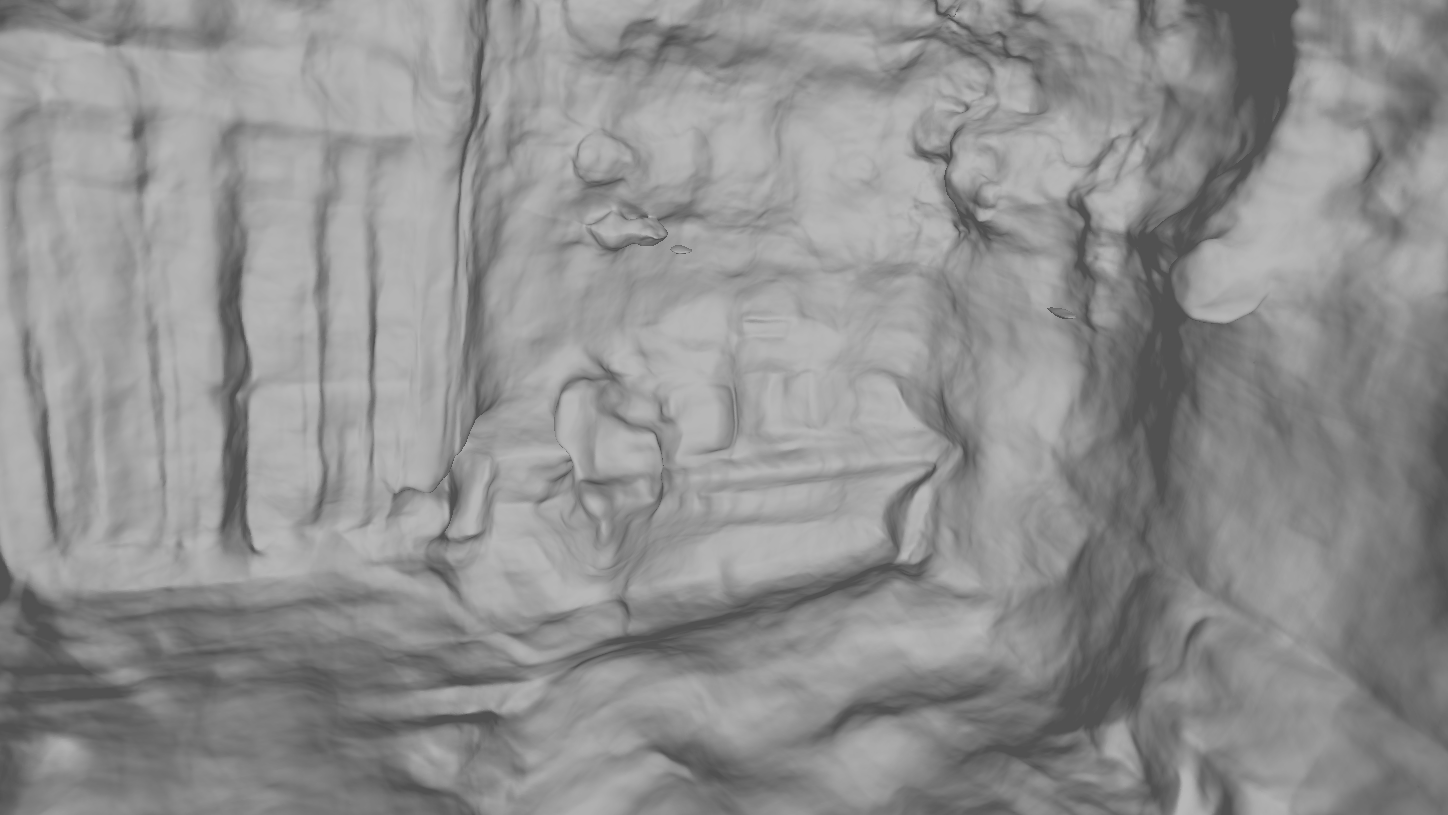
The main practical difference between BA-NeuS and NoPose-NeuS appears in indoor ScanNet scenes. The point-cloud alignment term gives a more direct geometric signal for long image sequences, though the method can still be sensitive to limited overlap.



@inproceedings{
sabae2023noposeneus,
title={NoPose-NeuS: Jointly Optimizing Camera Poses with Neural Implicit Surfaces for Multi-view Reconstruction},
author={Mohamed Shawky Sabae and Hoda A. Baraka and Mayada Hadhoud},
booktitle={UniReps: the First Workshop on Unifying Representations in Neural Models},
year={2023},
url={https://openreview.net/forum?id=TOp8uT3DZ9}
}@Article{sabae2026baneus,
author={Sabae, Mohamed Shawky
and Baraka, Hoda Anis
and Hadhoud, Mayada Mansour},
title={Ba-neus: joint optimization of neural implicit camera and geometry representations for multiview 3D reconstruction},
journal={Virtual Reality},
year={2026},
month={Jul},
day={01},
volume={30},
number={3},
pages={131},
abstract={3D reconstruction from multi-view RGB images is important for computer vision and computer graphics applications. Recently, neural surface reconstruction methods have shown promising results for reconstructing detailed 3D geometry in complex scenes. These methods can complement classical multi-view stereo approaches, especially under challenging appearance conditions such as non-Lambertian surfaces and thin structures. A common assumption for these methods is the availability of accurate multi-view camera parameters, which limits their applicability to real-world problems. In this paper, we present bundle-adjusting NeuS (BA-NeuS), a neural surface reconstruction method that integrates the core principle of BA, the joint and simultaneous optimization of 3D structure and camera parameters, directly into the neural reconstruction pipeline. Building on NoPose-NeuS and NeuS, our method performs this BA by jointly optimizing: (1) the implicit neural surface representation (the structure) and (2) the multi-view camera parameters (the motion). To achieve this, we represent the camera parameters, including not only poses but also intrinsics (focal length and optical center), as a multi-layer perceptron. We propose an additional multi-view point cloud alignment loss function that constrains this joint optimization and stabilizes camera-parameter estimation. Our experiments on object-level and scene-level datasets show that the proposed method can reconstruct plausible scene surfaces while estimating camera parameters in the evaluated settings. Compared with baselines that also estimate camera parameters, BA-NeuS gives a modest average improvement on DTU, achieving a mean Chamfer distance of 0.86 compared with 0.89 for NoPose-NeuS, while additionally optimizing camera intrinsics. The code is available at: https://github.com/DarkGeekMS/bundle-adjusting-neus.},
issn={1434-9957},
doi={10.1007/s10055-026-01423-1},
url={https://doi.org/10.1007/s10055-026-01423-1}
}